

产品展示
 MXL型号同步带轮
MXL型号同步带轮
产品分类:同步带轮-MXL同步带轮尺寸表 加入收藏
产品简介:同步带传动是由一根内周表面设有等间距齿形的环行带及具有相应吻合的轮所组成。带的工作面是齿的侧面,工作时,胶带的凸齿与带轮齿槽相啮合.由于它是一种啮合传动,因而带与带轮间不再存在相对滑动,从而使主、从动轮间的传动达到同步。
带轮材料常用灰铸铁、45#钢、铝合金、铜或工程塑料等。灰铸铁应用广,当V≤30m/s 时用HT200,V≥25~45m/s,则宜采用孕育铸铁开铸钢,也可用钢板冲压一焊接带轮。小功率传动可以用铸铝和塑料。
如何选择正确的同步带轮材料
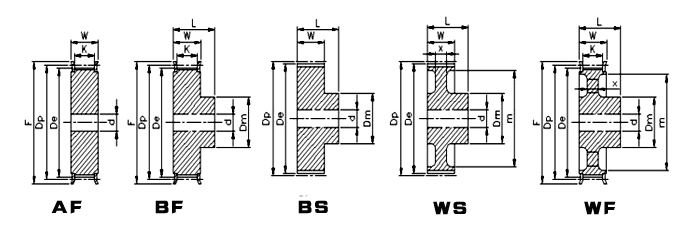
选择正确的同步带轮形状结构图
|
MXL型标准皮带宽025( |
|||||||||||||
|
规格 |
齿数 |
形状 |
节径 |
外径 |
W |
L |
K |
X |
轮彀直径 |
内孔 |
档边外径 |
档边内径 |
档边型号 |
|
20MXL |
20 |
C/A |
12.94 |
12.43 |
11 |
16 |
7 |
- |
9 |
6 |
18 |
11 |
F-101811 |
|
21MXL |
21 |
C/A |
13.58 |
13.08 |
11 |
16 |
7 |
- |
9 |
6 |
18 |
11 |
F-101811 |
|
22MXL |
22 |
C/A |
14.23 |
13.72 |
11 |
16 |
7 |
- |
9 |
6 |
18 |
11 |
F-101811 |
|
23MXL |
23 |
C/A |
14.88 |
14.37 |
11 |
16 |
7 |
- |
10 |
6 |
20 |
12 |
F-102012 |
|
24MXL |
24 |
C/A |
15.52 |
15.02 |
11 |
16 |
7 |
- |
10 |
6 |
20 |
12 |
F-102012 |
|
25MXL |
25 |
C/A |
16.17 |
15.66 |
11 |
16 |
7 |
- |
10 |
6 |
23 |
12 |
F-102312 |
|
26MXL |
26 |
C/A |
16.82 |
16.31 |
11 |
16 |
7 |
- |
10 |
6 |
23 |
12 |
F-102312 |
|
27MXL |
27 |
C/A |
17.46 |
16.96 |
11 |
16 |
7 |
- |
11 |
7 |
23 |
13 |
F-102313 |
|
28MXL |
28 |
C/A |
18.11 |
17.60 |
11 |
16 |
7 |
- |
11 |
7 |
23 |
13 |
F-102313 |
|
30MXL |
30 |
A/B |
19.40 |
18.90 |
11 |
16 |
7 |
- |
11 |
7 |
23 |
13 |
F-102313 |
|
32MXL |
32 |
A/B |
20.70 |
20.19 |
11 |
16 |
7 |
- |
13 |
8 |
26 |
16 |
F-102516 |
|
36MXL |
36 |
A/B |
23.29 |
22.78 |
11 |
16 |
7 |
- |
15 |
10 |
28 |
18 |
F-102818 |
|
40MXL |
40 |
A/B |
25.87 |
25.36 |
11 |
18 |
7 |
- |
17 |
10 |
31 |
20 |
F-103120 |
|
48MXL |
48 |
A/B |
31.05 |
30.54 |
11 |
18 |
7 |
- |
18 |
10 |
35 |
22 |
F-103522 |
|
60MXL |
60 |
A/B |
38.81 |
38.30 |
11 |
18 |
7 |
- |
28 |
20 |
44 |
32 |
F-104432 |
|
72MXL |
72 |
A/B |
46.57 |
46.06 |
11 |
18 |
7 |
- |
30 |
20 |
51 |
36 |
F-105136 |
|
84MXL |
84 |
A/B |
54.33 |
53.82 |
11 |
18 |
7 |
- |
35 |
23 |
61 |
41 |
F-106141 |
|
96MXL |
96 |
A/B |
62.09 |
61.59 |
11 |
18 |
7 |
- |
42 |
28 |
69 |
50 |
F-106950 |
|
120MXL |
120 |
A/B |
77.62 |
77.11 |
11 |
18 |
7 |
- |
56 |
37 |
86 |
66 |
F-108666 |
同步带轮设计要求
同步带轮由轮缘、轮辐和轮毂三部分组成。设计带轮时,应使其结构便于制造,质量分布均匀,重量轻,并避免由于铸造产生过大的内应力。V>5m/s 时要进行静平衡,V>25m/s 时则应进行动平衡。